|
Zeyuan Chen | 陈泽源 I am a second-year master's student at the Peking University.Currently, I am a research intern at Center on Frontiers of Computing Studies (CFCS) in the School of Computer Science at Peking University, advised by Prof. Hao Dong. Starting in September 2025, I will join Beijing Institute for General Artificial Intelligence (BIGAI) as a research intern under the supervision of Dr. Siyuan Huang and Dr. Tengyu Liu. In early 2026, I will begin an applied scientist internship at Amazon Frontier AI & Robotics (FAR) Lab. My research interests include Robotics and Dextereous Manipulation. My goal is to have artificial general intelligence free humans from complex physical work. Email / Google Scholar / Github / WeChat |

|
{kind=link}
News
|
Publications |

|
ClutterDexGrasp: A Sim-to-Real System for General Dexterous Grasping in Cluttered Scenes
Zeyuan Chen*, Qiyang Yan*, Yuanpei Chen*, Tianhao Wu, Jiyao Zhang, Zihan Ding, Jinzhou Li, Yaodong Yang, Hao Dong [CoRL 2025] Conference on Robot Learning 2025 (Oral) arXiv / website We propose the first close-loop sim-to-real system for general dexterous grasping in cluttered scenes. |
|
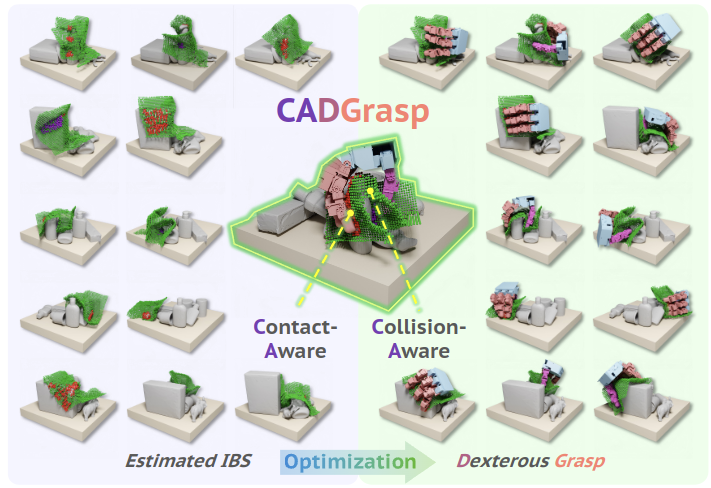
CADGrasp: Learning Contact and Collision Aware General Dexterous Grasping in Cluttered Scenes
Jiyao Zhang*, Zhiyuan Ma*, Tianhao Wu**, Zeyuan Chen**, Hao Dong [NeurIPS 2025] Neural Information Processing Systems 2025 website / code (coming soon) We propose a contact- and collision-aware intermediate representation for general dexterous grasping in clutterred scenes. |
|
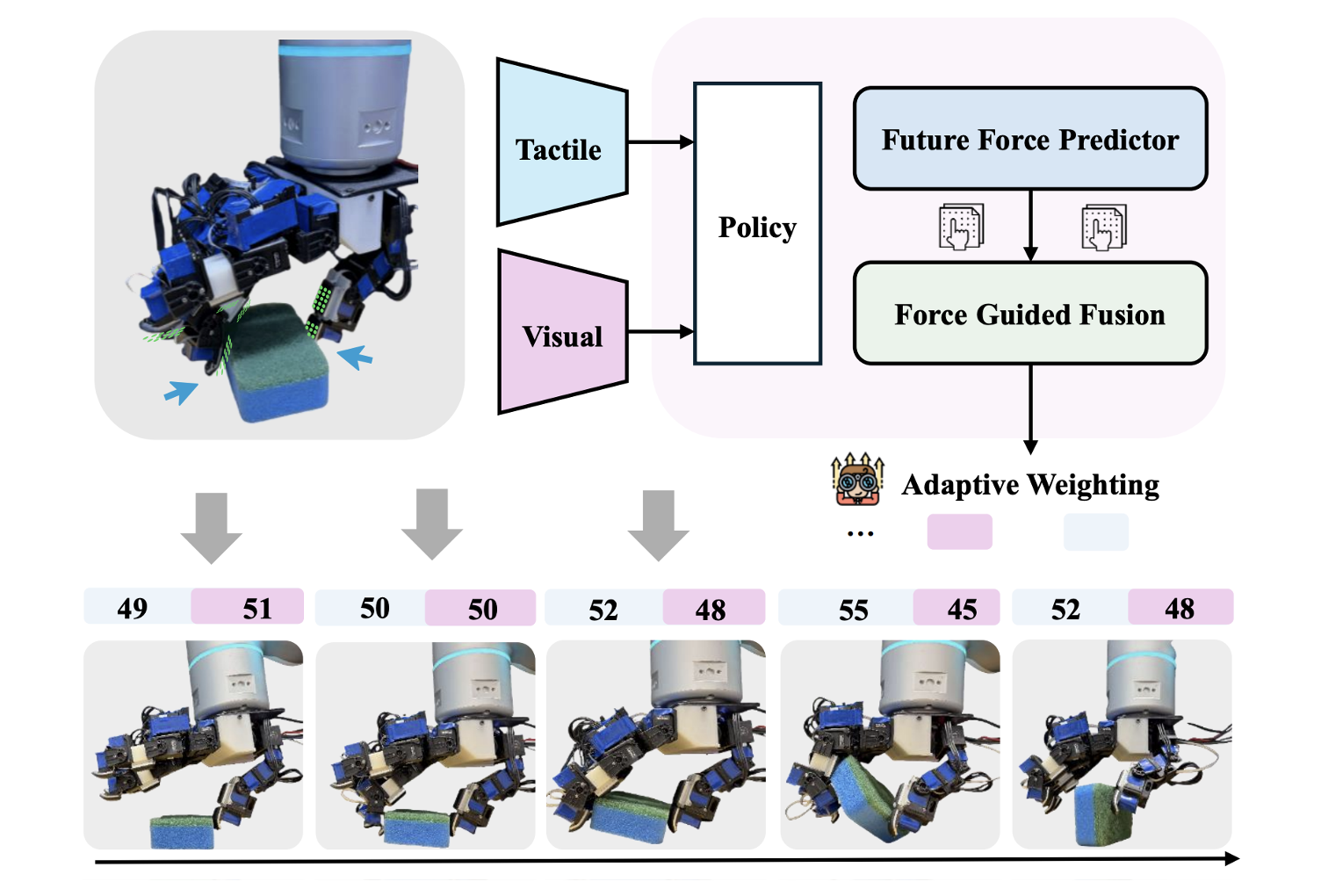
Adaptive Visual-Tacile Fusion with Predictive Force Attention for Dexterous Manipulation
Jinzhou Li*, Tianhao Wu*, Jiyao Zhang**, Zeyuan Chen**, Haotian Jin, Mingdong Wu, Yujun Shen, Yaodong Yang, Hao Dong [IROS 2025] IEEE/RSJ International Conference on Intelligent Robots and Systems 2025 arXiv/ website We propose a force diffusion & force-guided attention fusion module that adaptively adjusts the weights of visual and tactile features. |
Experience |
 |
2025.09 - Present Research Intern Advised by Dr. Siyuan Huang and Dr. Tengyu Liu |
|
|
2025.07 - present Algorithm Intern |
|
2024.07 - 2025.05 Research Intern Advised by Prof. Hao Dong |
|
 |
2023.09 - present Research Intern Advised by Prof. Hao Dong |
|
Borrowed from Jon Barron. |