|
Zeyuan Chen | 陈泽源 I am a third-year master's student at Peking University. Currently, I am a research intern at the Beijing Institute for General Artificial Intelligence (BIGAI), advised by Dr. Siyuan Huang and Dr. Tengyu Liu. Previously, I was an applied scientist intern at Amazon Frontier AI & Robotics (FAR) Lab, advised by Prof. Karen Liu, Prof. Guanya Shi, and Dr. Rocky Duan. I was also a research intern at the Center on Frontiers of Computing Studies (CFCS) in the School of Computer Science at Peking University, advised by Prof. Hao Dong. My research interests include Robotics and Dexterous Manipulation. Email / Google Scholar / Github / WeChat |

|
{kind=link}
News
|
Publications |
|
TeleDexter: Towards Human-level Dexterous Teleoperation
Puhao Li*, Zeyuan Chen*, Yingying Wu*, Pengkun Wei, Yuyang Li, Tianyu Wang, Jiaxiao Shi, Mingrui Yu, Baoxiong Jia, Song-Chun Zhu, Tengyu Liu, Siyuan Huang [RSS Workshop 2026] 4th RSS Workshop on Dexterous Manipulation: Scalable Learning for Human-Level Skills We introduce TeleDexter, a hand-object co-tracking controller that maps operator intent into learned low-level contact execution for dexterous teleoperation. The system transfers zero-shot to real robots and enables challenging in-hand reorientation and long-horizon tool-use tasks. |
|
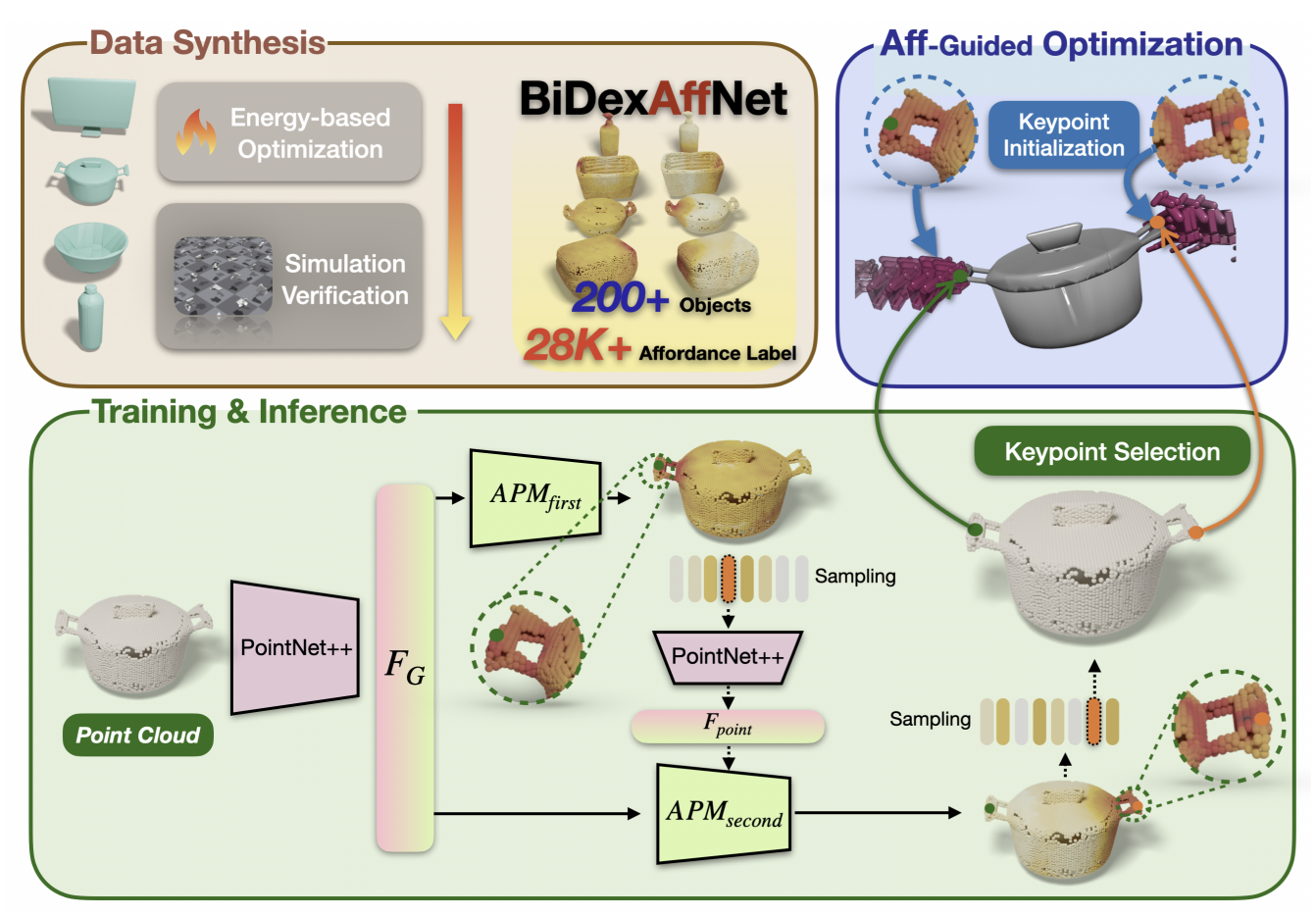
BiDexAffordance: Learning Collaborative Affordances for Efficient Bimanual Dexterous Grasping
Peiqi Liu, Jingwen Li, Zeyuan Chen, Yue Chen, Shuqi Zhao, Yuanpei Chen, Chenfeng Xu, Masayoshi Tomizuka, Wei Zhan, Ruihai Wu [RSS Workshop 2026] 4th RSS Workshop on Dexterous Manipulation: Scalable Learning for Human-Level Skills We present BiDexAffordance, an affordance-driven framework that predicts collaborative object-surface contact maps for efficient bimanual dexterous grasp synthesis. The learned priors guide lightweight physics-based optimization, improving simulated and real-world grasp success while generalizing to unseen objects. |
|
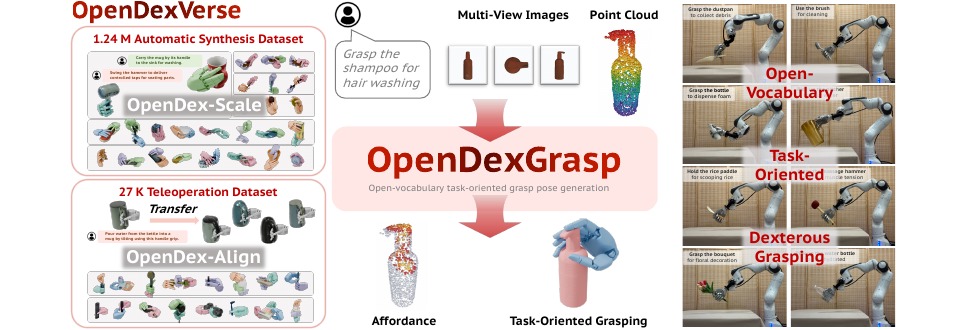
OpenDexGrasp: Open-vocabulary Task-Oriented Dexterous Grasping
Jiyao Zhang*, Junhan Wang*, Tianyu Wang*, Zeyuan Chen, Anthony Bolton, Yitong Peng, Hao Dong [In submission 2026] We present a unified data and generative modeling framework for open-vocabulary task-oriented dexterous grasping. The method grounds free-form functional intent in visual and geometric observations to generate executable, task-consistent dexterous grasps. |

|
ArtManip: Category-Level Articulated In-Hand Manipulation
Yang Yang*, Tengyu Liu*, Puhao Li, Zeyuan Chen, Yuyang Li, Xingwan Wang, Yingying Wu, Zhaopeng Cui, Siyuan Huang [In submission 2026] We introduce the first category-level articulated in-hand manipulation method that generalizes across object instances and diverse initial grasps. The system combines automated articulated-object and functional-grasp synthesis with robust two-stage policy learning, enabling zero-shot transfer to real objects with varied shapes and joint mechanics. |

|
ClutterDexGrasp: A Sim-to-Real System for General Dexterous Grasping in Cluttered Scenes
Zeyuan Chen*, Qiyang Yan*, Yuanpei Chen*, Tianhao Wu, Jiyao Zhang, Zihan Ding, Jinzhou Li, Yaodong Yang, Hao Dong [CoRL 2025] Conference on Robot Learning 2025 (Oral) arXiv / website We propose the first close-loop sim-to-real system for general dexterous grasping in cluttered scenes. |
|
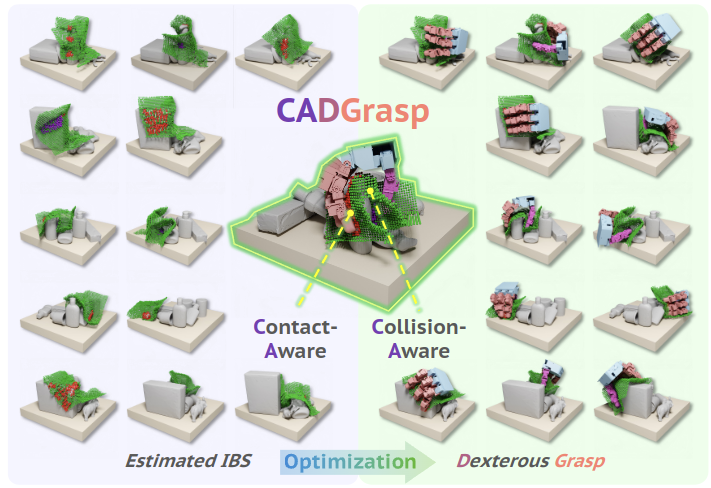
CADGrasp: Learning Contact and Collision Aware General Dexterous Grasping in Cluttered Scenes
Jiyao Zhang*, Zhiyuan Ma*, Tianhao Wu**, Zeyuan Chen**, Hao Dong [NeurIPS 2025] Neural Information Processing Systems 2025 website / code (coming soon) We propose a contact- and collision-aware intermediate representation for general dexterous grasping in clutterred scenes. |
|
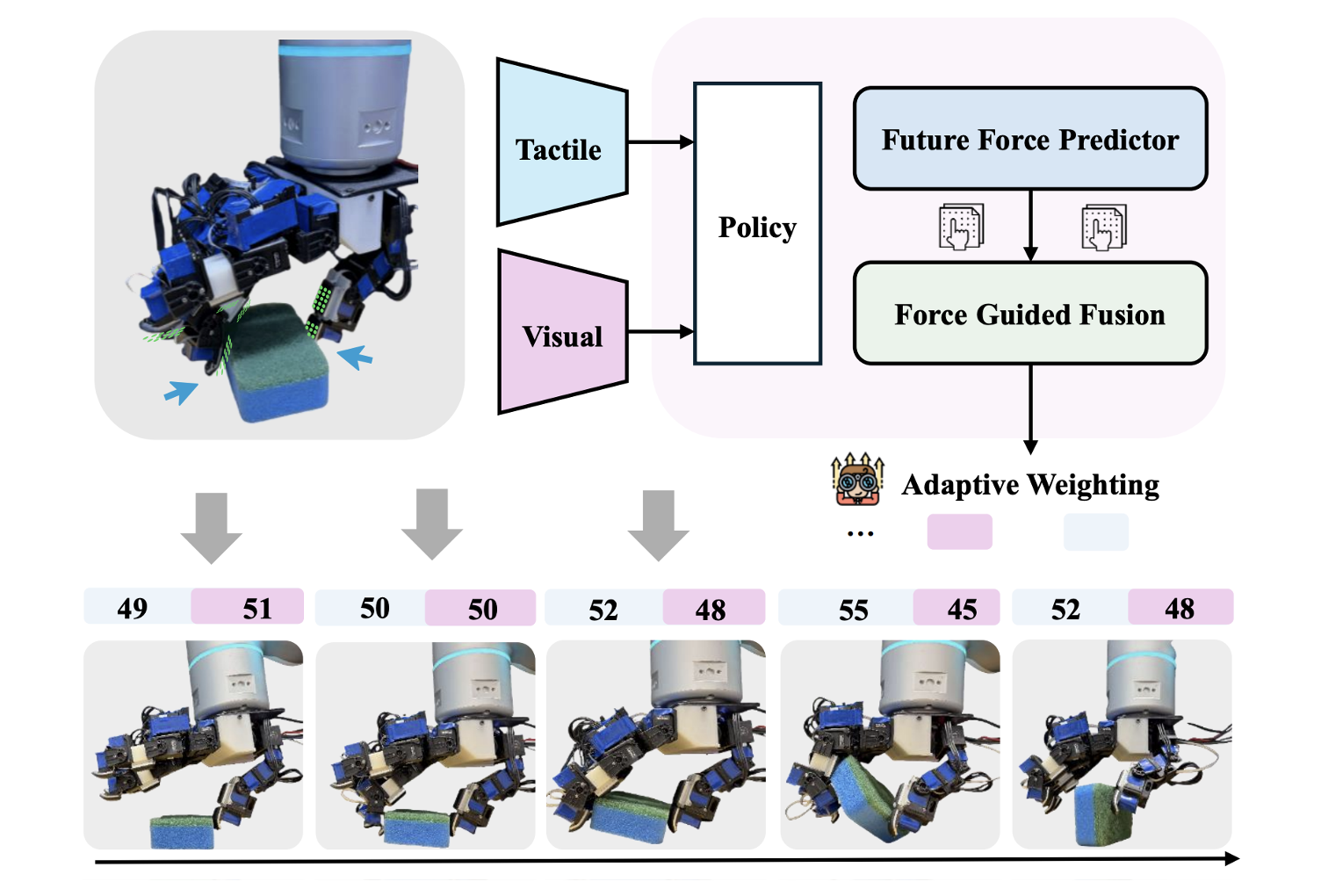
Adaptive Visual-Tacile Fusion with Predictive Force Attention for Dexterous Manipulation
Jinzhou Li*, Tianhao Wu*, Jiyao Zhang**, Zeyuan Chen**, Haotian Jin, Mingdong Wu, Yujun Shen, Yaodong Yang, Hao Dong [IROS 2025] IEEE/RSJ International Conference on Intelligent Robots and Systems 2025 arXiv/ website We propose a force diffusion & force-guided attention fusion module that adaptively adjusts the weights of visual and tactile features. |
|
Borrowed from Jon Barron. |